Mrtvé zjišťování (dead reckoning): princip, historie a použití
Mrtvé zjišťování je metoda odhadu polohy založená na posledním známém bodu, rychlosti a směru pohybu. Popisuje princip, historii, nástroje, chyby a současné aplikace v navigaci a robotice.
Přehled
Mrtvé zjišťování (angl. dead reckoning, zkráceně DR) je základní navigační metoda pro odhad aktuální polohy na základě posledního spolehlivého fixu, následovaného integrací směru a rychlosti pohybu v čase. V praxi se používá v tradiční navigaci, letectví, námořnictví, v autonomních vozidlech i v robotice, zejména tam, kde momentálně chybí přímé určení polohy z externích zdrojů.
Galerie obrázků
3 Obrázky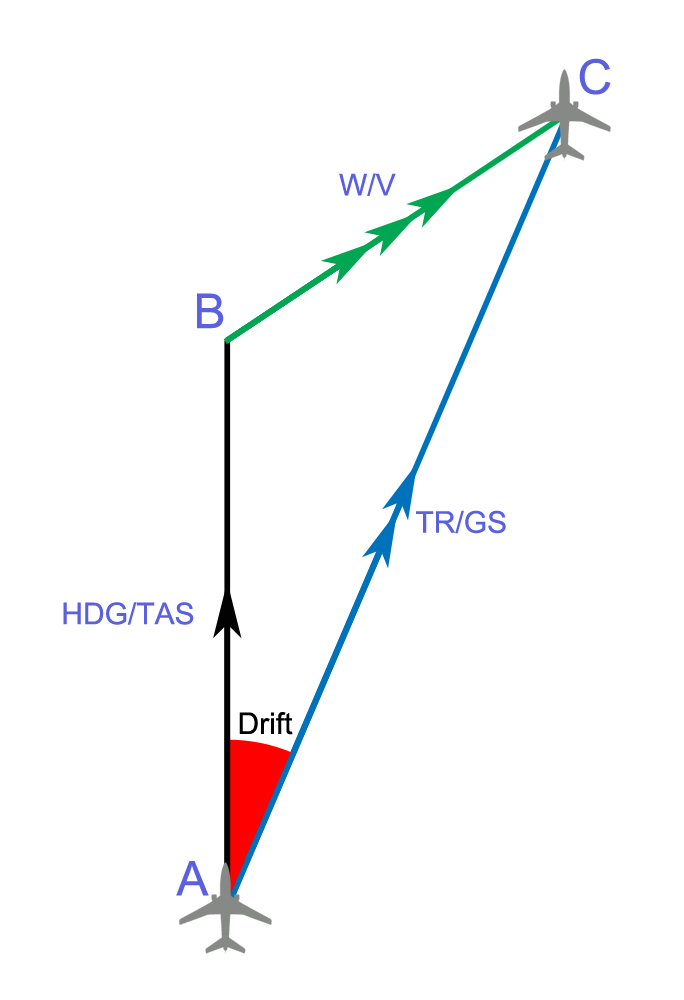


Princip a hlavní složky
Princip je jednoduchý: znáte-li bod, odkud jste vypluli nebo odstartovali, a máte-li po ruce údaj o směru a rychlosti během uplynulého času, můžete spočítat nový odhad polohy. V technickém provedení DR využívá:
- počátečního fixu (souřadnice známého bodu),
- měření směru (kompas, gyrokompas, gyroskopy),
- měření rychlosti nebo průběžné vzdálenosti (lodní log, dopplerův radar, snímače otáček kol, IMU),
- času, po který se pohyb udál.
Tento proces bývá matematicky vyjádřen integrací vektorové rychlosti v čase. Moderní systémy často kombinují DR s inerciální navigací a algoritmy pro fúzi senzorů (např. Kalmanův filtr) tak, aby snížily chybu odhadu.
Krátká historie
Mrtvé zjišťování je jednou z nejstarších navigačních technik. Námořníci odvozovali novou polohu od známé pozice pouze na základě kurzu a ujeté vzdálenosti, tedy „počítáním na mrtvo“. Tuto metodu používali plavci v době vědeckých objevů, například v souvislosti s cestami Kryštofa Kolumba, který při plavbách do Nového světa spoléhal na kombinaci mrtvého zjišťování a astrometrie. Zatímco pomocí hvězd bylo možné určit zeměpisnou šířku (šířka), určení délky do příchodu přesných námořních hodin (chronometrů) představovalo zásadní problém. Díky mrtvému zjišťování se překonávaly delší úseky, kde nebyly k dispozici žádné pozorovatelné body.
Použití dnes a technologické varianty
V moderní době je většina navigace založena na satelitních systémech jako GPS, nicméně DR stále hraje roli v situacích, kdy satelitní nebo jiný externí signál chybí. To může nastat při výpadku přijímače, ve vysokých budovách, v tunelech, v hustých lesích nebo při rušení satelitů (satelity). Dále se DR používá v:
- letectví jako záloha během výpadků přístrojů,
- námořnictví při plavbách mimo dosah pozemních orientačních bodů,
- robotice a autonomních vozidlech pro odhad pozice mezi korekcemi z LIDARu nebo GPS,
- herním průmyslu a simulacích pro modelování pohybu objektů.
Moderní formy zahrnují inerciální DR s pomocí IMU (akcelerometry a gyroskopy) a odometrické DR u pozemních vozidel, kdy se využívají snímače kol a senzorické fúze pro kompenzaci skluzu.
Výhody, omezení a metody redukce chyb
Hlavní výhodou DR je nezávislost na externích signálech a relativní jednoduchost. Hlavním omezením je kumulativní chyba: jakákoli nepřesnost v rychlosti, směru nebo času se postupně sčítá a odchylka od skutečné polohy roste. Typické zdroje chyb zahrnují magnetické rušení kompasu, proudy a vítr u plavidel a letadel, klouzání kol u vozidel a šum senzorů.
- Pro snížení chyb se používají pravidelné fixy z externích zdrojů (pevnina, maják, radar, GPS),
- fúze dat z více senzorů a statistické filtry,
- kalibrace zařízení a aktualizace meteorologických či hydrografických údajů.
Pozoruhodné příklady a význam
Mrtvé zjišťování sehrálo roli v mnoha historických plavbách a letech. Příklad z 20. století uvádí Richarda Byrda, který částečně spoléhal na odhad trasy při letech k pólům. Dnes má DR praktický význam jako záložní nebo doplňková metoda v systémech, kde je spolehlivost polohy kritická a kde krátkodobý výpadek signálu může ohrozit operaci. Proto se jeho principy stále vyučují námořníkům, pilotům i inženýrům zabývajícím se autonomními systémy.
V případě poruchy externího určování polohy (ztráta zařízení) nebo selhání satelitních služeb je DR často jediným dostupným prostředkem odhadu přibližné pozice až do obnovení přesných měření. Pro souvislé studium a další zdroje viz také obecné texty o dobách objevů a současné publikace o navigačních technologiích.

Metoda
Mrtvé počítání začíná od známého bodu (fix). Pak je třeba znát rychlost vozidla. Ve starých dobách lodě přehazovaly přes palubu kládu (přivázanou na laně) a počítaly, za jak dlouho tuto kládu přejedou (nebo tahaly za lano s uzly a počítaly, kolik uzlů se za určitý čas vytáhne). Tím by se zjistila rychlost lodi. Znalost směru z kompasu by udávala směr. Z těchto dvou čísel by bylo možné odhadnout (dobře odhadnout) aktuální polohu vozidla. Vítr však tlačí vozidlo na jednu stranu (tzv. drift), takže je třeba změřit i tento jev. Také ve vodě existují proudy, a to i uprostřed oceánu. Časem by to mohlo způsobit chyby, proto byly vytvořeny mapy, které proudy korigují.
Letadla mohou snadno měřit rychlost větru (jak rychle letí vzduchem), ale ne rychlost pohybu nad zemí (tzv. pozemní rychlost). Protivítr, vítr v zádech nebo boční vítr mění přízemní rychlost. Pokud je známa výška letadla, lze přízemní rychlost zjistit tak, že se změří, jak rychle letadlo proletí kolem nějakého objektu na zemi. (Čím výše se nacházíte, tím pomaleji se zdá, že se země pohybuje). Ke zjištění pozemní rychlosti a snosu letadla lze použít okénko na podlaze letadla.
Vozidlo na zemi může také používat mrtvý tah. Obvykle se nemusí obávat snosu od větru a na zemi nejsou žádné proudy, takže toto počítání je jednodušší.
Otázky a odpovědi
Otázka: Co je to Dead Reckoning?
A: Dead Reckoning (neboli DR) je metoda odhadu polohy pomocí posledního známého bodu, rychlosti a směru pohybu.
Q: K čemu se používá Dead Reckoning?
Odpověď: Zjišťování mrtvého bodu se používá ke sledování polohy lodi, letadla nebo vozidla.
Otázka: Proč se nyní mrtvé zjišťování tolik nepoužívá?
Odpověď: K navigaci se nyní používá globální polohový systém (GPS), takže je mrtvý bod méně důležitý.
Otázka: V jakých situacích je Dead Reckoning stále užitečný?
Odpověď: Mrtvý bod je užitečný v oblastech, kde není k dispozici systém GPS, nebo na krátkou dobu, pokud dojde ke zmeškání aktualizace systému GPS.
Otázka: Proč je důležité vědět o funkci Dead Reckoning?
Odpověď: Znalost funkce Dead Reckoning je důležitá pro případ poškození satelitů GPS nebo ztráty zařízení, aby se námořníci a piloti mohli stále orientovat.
Otázka: Jak námořníci mapovali svět po příchodu Kryštofa Kolumba do Nového světa?
Odpověď: Námořníci používali Dead Reckoning a hvězdy k určení zeměpisné šířky a mapování světa.
Otázka: Jak se Richard Byrd stal prvním člověkem, který doletěl na severní pól?
Odpověď: Richard Byrd použil Dead Reckoning k tomu, aby v roce 1926 doletěl na severní pól, letěl 16 hodin a vrátil se na místo, které opustil, přičemž pod sebou měl jen ledová pole.
Související články
Autor
AlegsaOnline.com Mrtvé zjišťování (dead reckoning): princip, historie a použití Leandro Alegsa
URL: https://cs.alegsaonline.com/art/25956
Zdroje
- deadreckoning.com : "Reckoning Aviation Navigation"
- belfortinstrument.com : "How Byrd Navigated to the North Pole"
- ship468.org : "Sea Scout Ship, Navigation"